
相對於聽覺、視覺而言,人類天生的觸覺更加複雜,觸覺感官的模擬十分困難,這種感官「集成」了上千種感受器來追蹤不同類型的壓力(比如柔軟而有力的觸摸),以及感受溫度和位置變化的能力。這些龐大的資訊需要通過神經網路傳送:神經信號通過局部神經簇傳到脊髓並最終傳到大腦。只有當信號足夠強時,資訊才能在傳輸過程中成功連接起來。

最近,斯坦福大學鮑哲南教授、首爾大學Tae-Woo Lee教授、南開大學徐文濤教授團隊宣布聯合研發出一種人造感覺神經(也可稱為人造傳入神經),能夠以類似於生物神經的方式發揮作用,感知觸摸過程並與其他神經溝通。論文發表在近日的《Science》上。
根據論文,這種人造感覺神經具有良好的生物相容性、柔性和高靈敏度,可以探測不同方向的運動,甚至能識別點字。此外,團隊設法將人造神經與生物體連接起來:把人造神經元的一個電極插入蟑螂腿的神經元後,來自人造神經元的信號能引起蟑螂腿部肌肉的收縮。
可以預想,這種人造觸覺神經在機器人手術、義肢感觸等領域都將有很好的應用前景,這對「機器觸覺」的實現也算是一項重大進展。
三大核心組件
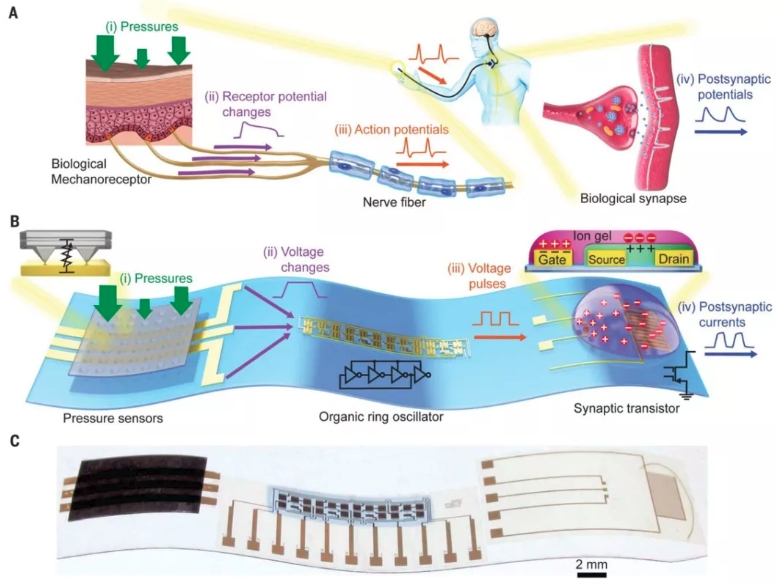
生物傳入神經系統的觸覺產生機制是:壓力作用於生物體的機械型刺激感受器,引起其感受電位的改變,而這種改變會觸發神經元動作電位的產生。多個神經元動作電位通過神經元之間形成的突觸匯合,最終實現資訊處理。
而此次的人造傳入神經系統則參考了生物的傳入神經系統,由三大核心元件構成:觸覺感受器、人造神經元和突觸電晶體。
其中,觸覺感受器由一組壓力感測器組成,連接到一個作為人造神經元的環形振盪器上;一系列感測器負責感知壓力信號,並由此產生相應的電壓變化;之後,環形振盪器會將電壓變化轉變成電脈衝;最後,突觸電晶體將電脈衝輸出,從而形成完整的反射弧。
針對該人造感覺神經,文章的通訊作者之一、南開大學光電子薄膜器件與技術研究所教授徐文濤對DT君介紹道,這個系統還處於初步階段,從實驗室到工業化的過程中仍存在很多挑戰,在3個組成部分中都會有所涉及。
「對於感測器來講,在這項工作中我們嘗試了模擬SA-I觸覺神經(一種邊緣、質地相關觸覺感知的重要傳入神經)。人體皮膚通過多種感測器的集成來感受不同程度的外界刺激,因此在工業化的過程中,需要更加複雜的壓力傳感集成。柔性電路部分相對複雜,需要較好的工藝程序控制,」他說,「突觸器件則具有很大的挑戰。其性能調控要求對材料的選擇和器件的結構等方面都有較多經驗、需要很多的嘗試,其大規模集成等也是非常具有挑戰性的課題。」
三管齊下:感受方向、傳遞資訊、識別點字
2015 年,《Science》曾經刊出過鮑哲南團隊的一項人造皮膚成果。當時,團隊製造的人造皮膚已經可以回應壓力變化,並向神經細胞發送信號,因此更接近人皮膚觸覺的真實機制。
而這一次的人造感覺系統能夠說明人造皮膚實現更接近生物體的觸覺,正如上文所提,該感覺系統已經能夠感受方向、傳遞資訊和識別點字。
在識別點字的試驗中,研究人員以 3X2 圖元的點字字元作用於對應的 6 個壓力感測器,並利用 6 個對應的環形振盪器實現信號的轉換,最後通過多個突觸電晶體獲得突觸後電流的波形以實現對點字字元的識別。
根據突觸後電流的峰值頻率的特徵,就能對應於點字字元的每個圖元(如圖 B)。例如(如圖 C),點字字元的每個圖元所產生的接觸壓力不同,其對應的突觸後電流的峰值頻率也會產生對應的差異,從而實現點字字元的「閱讀」。
但是,光有靈敏的壓力感覺還不能打造出我們真正需要的人造感覺神經,它還必須能夠實現生物體神經信號的相容。因此,研究人員將這種神經連接到蟑螂腿上實現運動的控制,則初步證實了這種相容性。
研究者將製作的人造感覺神經與蟑螂腿的生物運動神經連接,組合成生物-電子混合反射弧,實現了蟑螂腿的彈跳反射運動。團隊把人造神經元的一個電極插入蟑螂腿的神經元,來自人造感覺神經的突觸後電流經過特定放大器後連接至一條蟑螂腿,當人造感覺神經接收到壓力的輸入時,產生的放大信號會引起腿部脛骨伸肌的興奮,蟑螂腿的彈跳反射就被啟動了。
「對於SA-I類觸覺神經的模擬,我們已經將其回應速度控制在與生物體系非常接近的範圍。而對於我們的系統來說,可以實現更大的靈活性,其回應速度是完全可以超越生物體系的。」徐文濤教授介紹說。
他也提到,從功耗的角度上來說,這種人造感覺神經仍然有非常大的提升空間。比如,其中人造突觸電晶體的部分,團隊一直在致力於將其能耗進一步降低。目前,納米線結構的人造突觸電晶體能耗已經被降至與生物突觸類似的程度。
柔性材料發揮重要作用
值得一提的是,本次成果使用的人造突觸電晶體並不是傳統的矽基突觸。「和傳統矽基突觸相比,這裡用到的人造突觸電晶體具有結構簡單、功能調控的靈活性以及柔韌性等優勢。」徐文濤教授說道。
據徐文濤教授介紹,結構上,傳統矽基材料利用多個電晶體等器件組成的電路也可以實現突觸的類似功能,但是,實現一個突觸的功能需要多個器件,從集成尺度和能耗等方面,與人造突觸電晶體相比均不具有優勢,人造突觸電晶體單一器件可以模擬突觸的功能。
而在功能上,人造突觸電晶體可以很容易地通過材料的選擇以及其內部微結構的控制調節其性能,靈活多變。
另外,柔性有機材料的應用使得人造突觸電晶體能具有很好的柔韌性,以及輕質等特點。這將更加適合於舒適性人體假肢感覺的重現和可穿戴電子的應用等。
美國康奈爾大學的有機電子學專家Robert Shepherd則表示「這是一個非常好的進展」。他還表示,柔性有機材料用於製備人造神經、與柔軟的人體組織結合表現非常理想,而且它們的製備成本相對便宜。
這也就意味著,未來科學家可以集成更多人造神經系統,接收各種不同的感覺資訊。這樣的神經系統有望為未來的假肢穿戴者提供更多感覺資訊,說明他們更好地控制假肢;也有望賦予未來機器人更強的能力,使得它們能夠與千變萬化的環境交互,而這對執行複雜任務是非常重要的,比如照顧老年人。
徐文濤及其團隊也表示,目前這款人造感覺神經還處在初步階段,尚不能像皮膚那樣感知更加複雜的機械資訊以及溫度等,這些將是他們未來的工作方向。這款發明讓他們有望開發出更智慧的人造皮膚,希望通過進一步強化和功能拓展,儘早將其投入應用,造福人類。
本文係由DeepTech深科技授權刊登。原文連結:人造感觉神经问世!鲍哲南团队最新突破:人造皮肤已可识别盲文